Projects
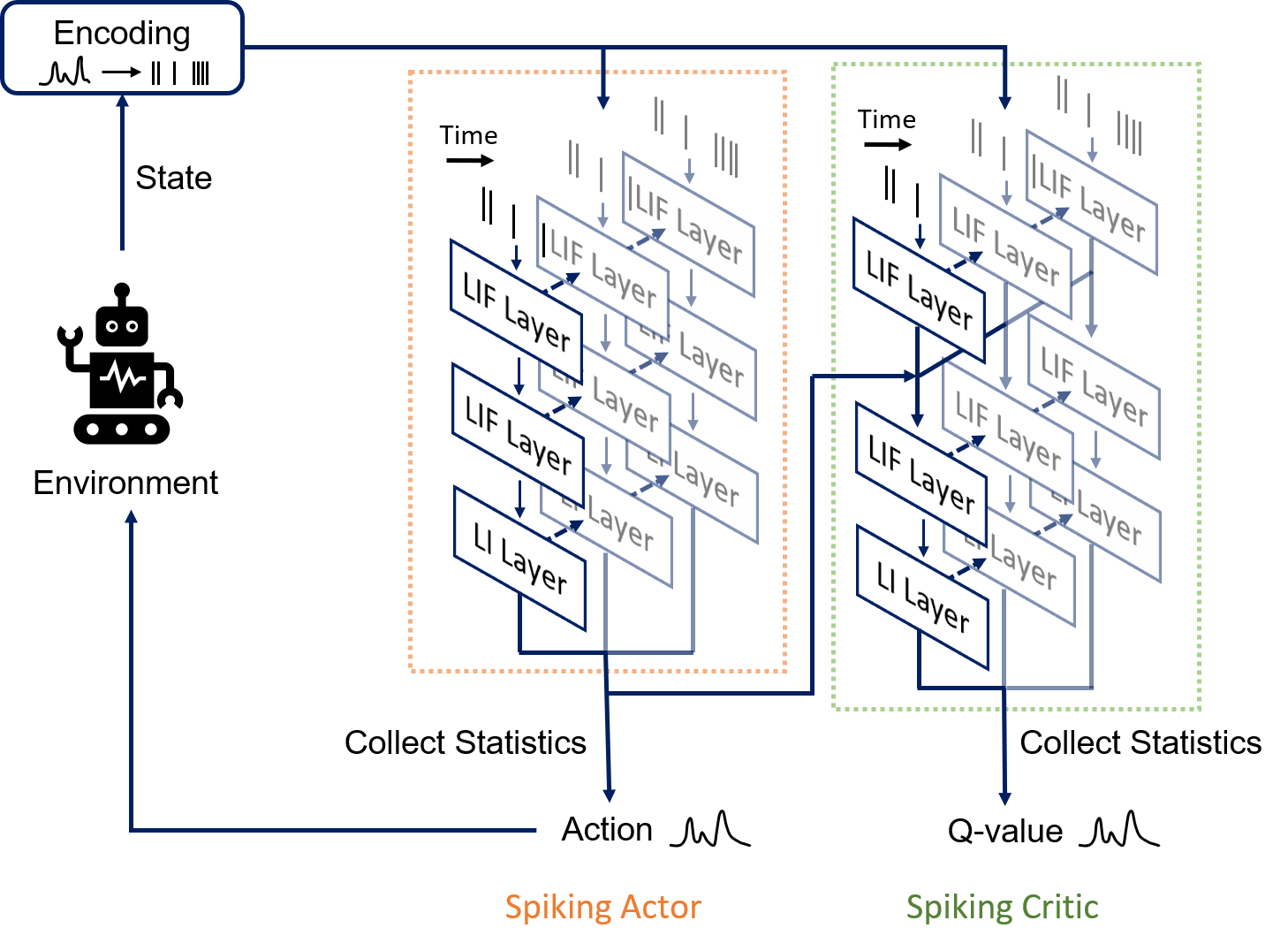
Spiking Reinforcement Learning for Robust Robot Control Under Varying Operating Conditions
P. Mondorf (2022). Spiking Reinforcement Learning for Robust Robot Control Under Varying Operating Conditions. M.Sc. Thesis, School of Electrical Engineering and Computer Science, KTH Royal Institute of Technology.
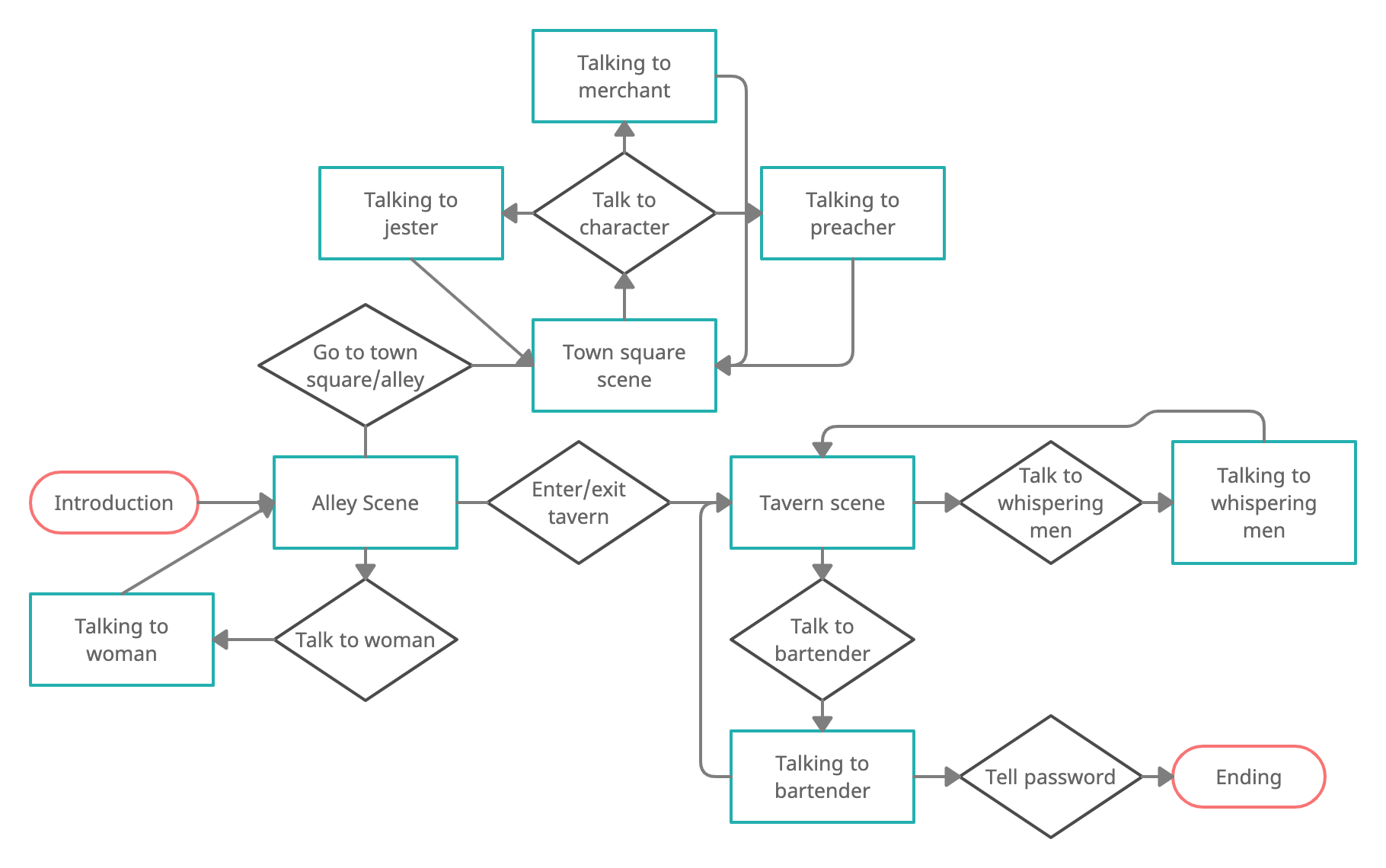
The Influence of Emotion Detection on User’s Engagement in an Interactive Storytelling Scenario
S. Antaris, W. Eriksson and P. Mondorf (2022). The Influence of Emotion Detection on User’s Engagement in an Interactive Storytelling Scenario. Project Report, Division of Speech, Music and Hearing, KTH Royal Institute of Technology.
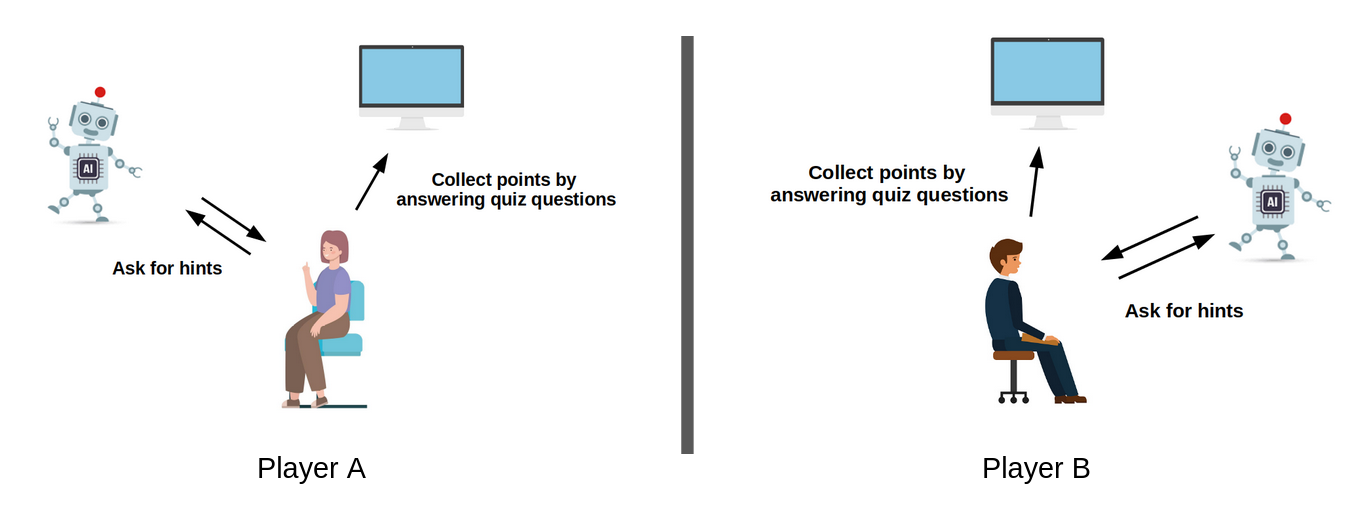
Risks of Conversational Robots as Moral Agents Influencing Humans towards Unethical Behaviours
J. Almeida, M. Fraile, P. Mondorf and V. Sanchez (2022). Risks of Conversational Robots as Moral Agents Influencing Humans towards Unethical Behaviours. Project Report, Division of Robotics, Perception and Learning, KTH Royal Institute of Technology.
Pedestrian Tracking in Video Sequences using Particle Filters
P. Mondorf, T. Labourdette‑Liaresq and D. Singh (2021). Pedestrian Tracking in Video Sequences using Particle Filters. Project Report, Division of Robotics, Perception and Learning, KTH Royal Institute of Technology.
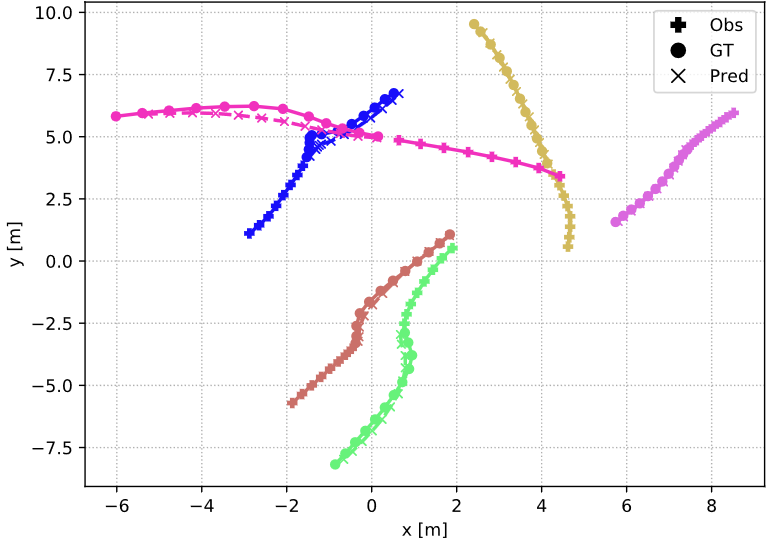
Modeling Social Interactions for Pedestrian Trajectory Prediction on Real and Synthetic Datasets
P. Mondorf (2020). Modeling Social Interactions for Pedestrian Trajectory Prediction on Real and Synthetic Datasets, B.Sc. Thesis, Department of Informatics, Technical University of Munich.